Simulation
Force-feedback devices for physical interaction with virtual worlds
HARDWARE
6 DOF active force-feedback devices
Virtuose™ 6D RV
Virtuose 6D RV, the large workspace haptic device

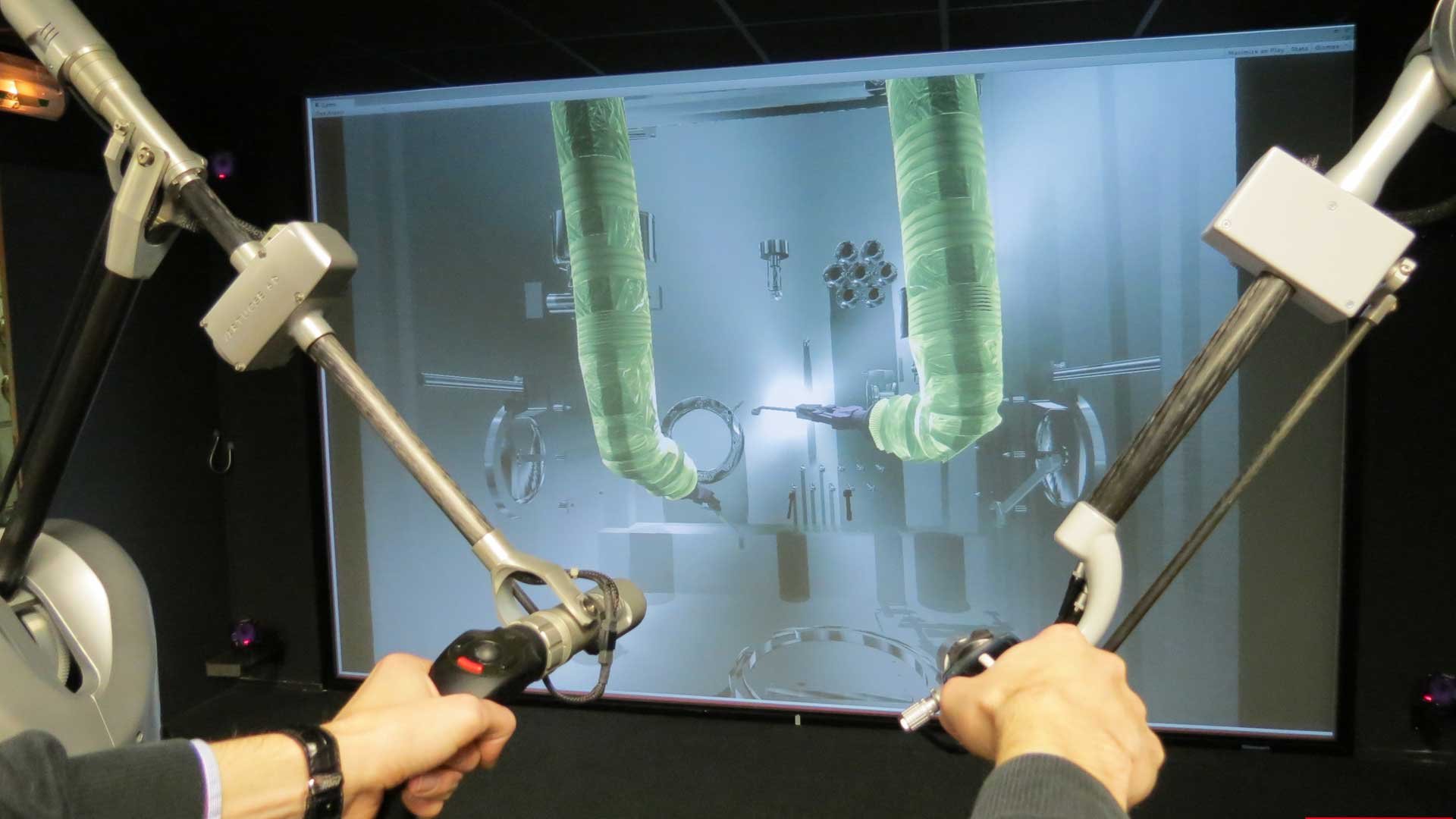
The Virtuose 6D RV is the only product on the market combining a high force feedback in the 6 degrees of freedom with a large workspace. The Virtuose 6D RV is especially suited for scale one manipulations, for instance in simulation and virtual reality.
The handle of the Virtuose 6D RV has 3 buttons of which 2 are programmable. This handle is replaceable through our tool changer. The tool changer is an accessory delivered in option, which allows to use different kinds of objects in order to replace the standard handle. For instance, you can use 3D printed objects to simulate your operation with even more realism!
Thanks to its static weight compensation with springs, it is even possible to use the Virtuose 6D RV in an upside-down configuration without impacting the level of force-feedback – it simply requires to let us know when issuing your order.
The Virtuose 6D RV is also available in High Force Version, which allows to double the level of force feedback available on the haptic device. This version is predestined for applications in need of a very high level of force-feedback, in simulation as well as in teleoperation.
The Virtuose 6D RV is also compatible with our range of software solutions, which allow you to directly use the device in CAD software to perform assembly simulation and in 3D game engines to generate even more realistic immersive experiences.
Desktop 6D
The perfect little brother


The Desktop 6D is simply one of the best fully active haptic device in a Desktop size. It provides 6 active degrees of freedom, in other words force-feedback on both translations and rotations, and its handle integrates a trigger and 1 button. A extra button-box provides 2 additional programmable buttons and an activation sensor.
The Desktop 6D was designed with the goal to pass on the efforts with a very high level of fidelity and transparence, while still maintaining a minimal footprint. Based on the same API as our other products, it benefits from years of software engineering.
The serial architecture of our Virtuose range of products is especially well suited for the Desktop 6D haptic device: despite of its contained size, the device offers very extended possibilities of movements in its rotations, while the workspace in translations can be compared to the one of the human arm pivoting from the elbow.
The Desktop 6D is also compatible with our range of software solutions, which allow you to directly use the device in CAD software to perform assembly simulation and in 3D game engines to generate even more realistic immersive experiences.
Thanks to its static weight compensation with springs, it is even possible to use the Desktop 6D in an upside-down configuration without impacting the level of force feedback of the workspace – it simply requires to let us know when passing your order.
Thanks to its compact size, the Desktop 6D can be integrated into a virtual training system.
3 DOF active force feedback devices
Virtuose™ 3D RV
No compromise

The Virtuose 3D RV is the 6D haptic device, which means it allows movements in all degrees-of-freedom, in other words translations and rotations. Based on the structure of the Virtuose 6D RV, the Virtuose 3D RV offers the same workspace and the same level of force feedback. The force feedback of the Virtuose 3D RV is only happening on the 3 translations, hence its name.
The Virtuose 3D RV is especially suited for scale one virtual, that do not necessarily require force feedback on the rotations, but which needs to be able to control the rotations in position. The Virtuose 3D RV was used with success in rehabilitation applications and medical co-manipulation robotic solution.
The handle of the Virtuose 3D RV has 3 buttons of which 2 are programmable. This handle is replaceable through our tool changer. The tool changer is an accessory delivered in option, which allows to use different kind of objects in order to replace the standard handle. For instance, you can use 3D printed objects as a new handle on the Virtuose 3D RV.
Thanks to its static weight compensation with springs, it is even possible to use the Virtuose 3D RV in an upside-down configuration without impacting the level of force feedback of the workspace – it simply requires to let us know when passing your order.
The Virtuose 6D RV is also available in a High Force Version, which allows to double the level of force feedback available on the haptic device. This version is predestined for applications in need of a very high level of force feedback.
We are available to study with you your request to integrate the Virtuose 3D in your final solution.
Desktop 3D
The right companion


The Desktop 3D is a 6D haptic interface, which means it allows movements on all degrees-of-freedom, in other words both on translations and rotations. The force feedback of the Desktop 3D only happens on the translations, hence its name.
The Desktop 3D was designed with the goal to pass on the efforts with a very high level of fidelity and transparence, while still maintaining a very minimal footprint. The handle uses a standard M6 connector, allowing for easy change by any kind of other tool. Based on the same API as our other products, it benefits from years of software engineering.
The serial architecture of our Virtuose range of products is especially well suited for the Desktop 3D haptic device: despite of its contained size, the device offers very extended possibilities of movements in its rotations, while the workspace in translations can be compared to the one of the human arm pivoting from the elbow.
Thanks to its static weight compensation with springs, it is even possible to use the Desktop 3D in an upside-down configuration without impacting the level of force feedback of the workspace – it simply requires to let us know when passing your order.
Thanks to its compact size, the Desktop 3D can be integrated into a virtual training system.
Scale1™ Extra large workspace Motorized carrier Customizable
Better, bigger, stronger
The Scale1 is a motorized platform which allows to extend the workspace of a Virtuose 6D RV haptic device. The force-feedback of the Scale1 is therefore performed through the Virtuose 6D RV, the final solution becoming as such the haptic interface with the biggest workspace in the world.
The Scale1 is born from the will to escape from the restricted space of a standard haptic interface. In a few years, it became a masterpiece of engineering, installed at the most prestigious laboratories and companies. The Scale1 is considered the most upscale force feedback product.
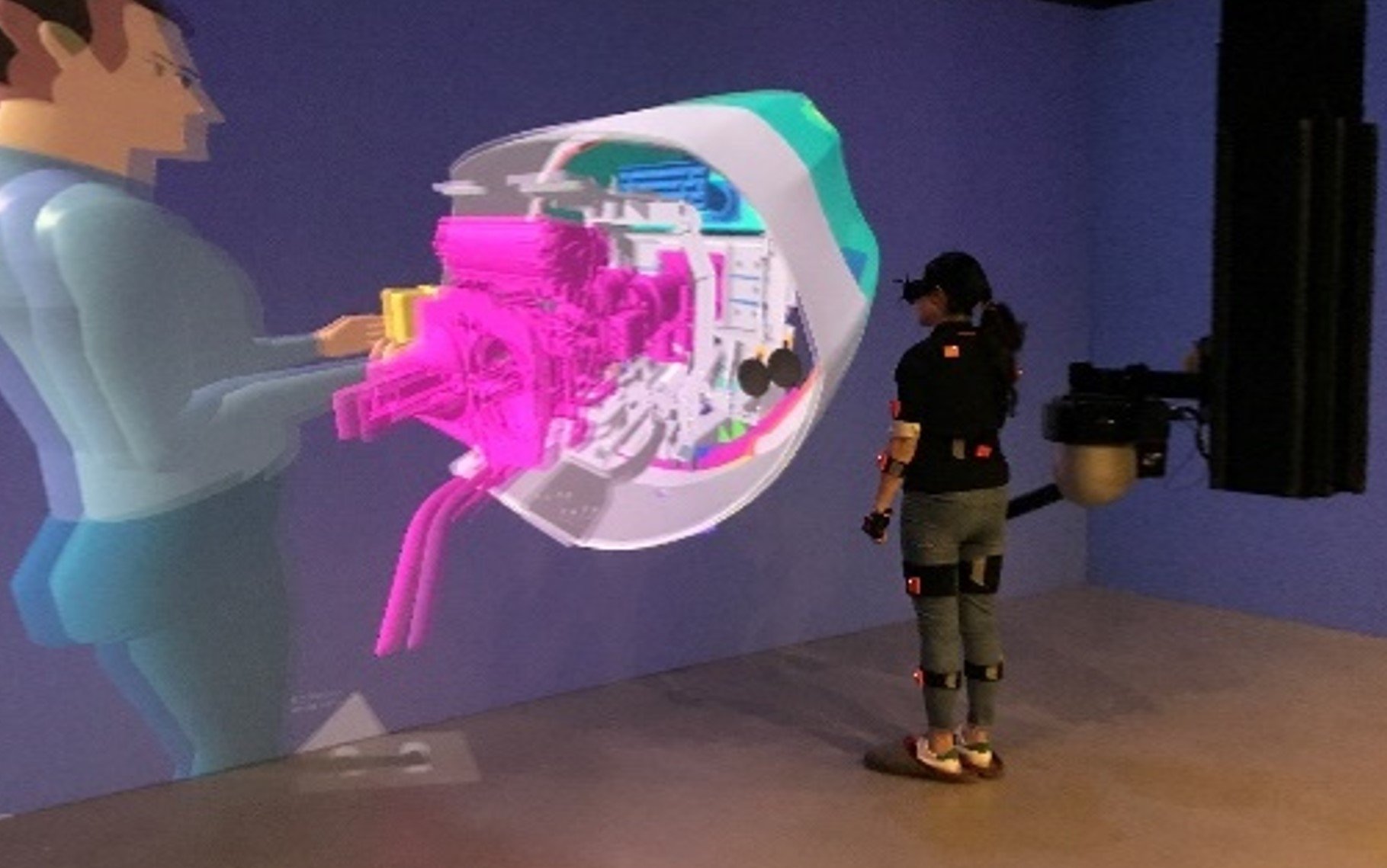
The Scale1 is mainly used in two different applications. On one side, the companies and industrials willing to simulate with as much realism as possible their assembly operations, maintenance processes, accessibility verifications, or their ergonomic assessments, in advance of the manufacturing phases, in conjunction with the prototyping steps. On the other side, the laboratories and universities decide to use this technology to benefit of a state-of-the-art haptic device to further interact with the immersive environments and push the acquired knowledge on human behaviors, cognitive science and different study topics which are using virtual reality as a vector.
The Scale1 design is entirely customizable. We can adapt it to the size of your room, to the size of your screen or to the dimensions of your CAVE. It is declined in different versions, from 1 to 3 degrees of freedom, and can carry one or two Virtuose 6D RV. A recent version even supports a seat for the user, allowing him to literally fly inside the immersive environment!
Most will describe the Scale1 as state-of-the-art in terms of haptic device. Do not hesitate to contact us to study the implementation of a Scale1 in your environment or for your specific project.
SOFTWARE
Framework for connecting the haptic device to your simulations
RaptorAPI

The RaptorAPI is a C++ low-level driver, giving access to the functionalities embedded in Haption’s haptic devices. The RaptorAPI is used to implement the communication protocol with the control software.
Available platforms :
Microsoft Windows
Linux
Each Haption haptic device is delivered with a free and unlimited license of the RaptorAPI. It does not include the transmission of source code.
VirtuoseAPI
The VirtuoseAPI is a C low-level driver, giving access to the functionalities embedded in Haption’s haptic devices. The VirtuoseAPI is used to implement the communication protocol with the control software.
Available platforms :
Microsoft Windows
Linux
Each Haption haptic device is delivered with a free and unlimited license of the VirtuoseAPI. It does not include the transmission of source code.
ROS

ROS (Robot Operating System) is an open source library used to create software control for robots. It is widely used around the world. Haption has developed a ROS Node Package for its haptic products. It is only available as a beta version today.
Our ROS package is available for free upon request for our customers.
ROS2

ROS2 (Robot Operating System 2) is an open source library used to create software control for robots. It is widely used around the world. Haption has developed a ROS2 Node Package for its haptic products. It is only available as a beta version today.
Our ROS2 package is available for free upon request for our customers.
IPSI
PSI™ SDK (Interactive Physics Simulation Interface) is a software library for rigid-body physics simulation with force-feedback developed by Haption in collaboration with CEA LIST. It is the only software technology available on the market today able to carry out a real-time simulation at near-kHz frame rate with very large, non-convex geometries. Thanks to its use of a voxel-based representation of physical objects, IPSI is very tolerant with respect to “dirty” geometry. IPSI can guarantee the non-interpenetration of objects, and set a strict value for the clearance between objects.
IPSI is used in the implementation of the following products by Haption:
IPSI is a physics engine and a comprehensive solution to stability problems, model complexity and precision issues in case of industrial applications.
What is haptics for interactive simulations?
Assembly Process Planning is a very important task in the development of a new industrial product. If not done properly, it can lead to extremely high added costs, resulting from the impossibility to integrate components according to the prescribed assembly procedure. Typical problems are: insufficient room for moving a component to its intended position; screws not reachable with the prescribed tool; not enough visibility for the operator to ensure the quality of the assembly; etc.