Imitation Learning, Physical AI, TeleRobotics, Teleoperation
Imitation Learning
Source : https://pressroom.toyota.com/toyota-research-institute-unveils-breakthrough-in-teaching-robots-new-behaviors/
“Our research in robotics is aimed at amplifying people rather than replacing them,” said Gill Pratt, Chief Scientist for Toyota Motor Corporation. “This new teaching technique is both very efficient and produces very high performing behaviors, enabling robots to much more effectively amplify people in many ways. Previous state-of-the-art techniques to teach robots new behaviors were slow, inconsistent, inefficient, and often limited to narrowly defined tasks performed in highly constrained environments.”
Source : https://pressroom.toyota.com/toyota-research-institute-unveils-breakthrough-in-teaching-robots-new-behaviors/
Force feedback is becoming a strategic technology for the next wave of Physical AI and intelligent robotics. As Europe and global technology leaders accelerate investments in sovereign AI, advanced automation, and resilient manufacturing, the ability to capture and reproduce high-fidelity physical interactions is emerging as a critical capability for next-generation robotic systems.
From teleoperation and telerobotics to remote manipulation and human-robot collaboration, force feedback provides the essential sensory interface connecting human expertise with machine intelligence. By enabling precise interaction with the physical world, haptic technologies allow robots to safely operate in complex, unstructured environments while extending human skills across distance.
Tomorrow, major challenges such as labor shortages, remote operations, digital twins, and Industry 5.0 will drive demand for advanced haptic technologies across aerospace, healthcare, defense, nuclear, semiconductor manufacturing, and research infrastructures. At the convergence of robotics, haptics, AI, and automation, force feedback is laying the foundation for truly embodied intelligence and the next generation of autonomous systems.
Benchmark Scenarios & Demonstrations
Single Arm + Glove
Source : Haption & SenseGlove at ICRA 2026
Dual Arms + Gloves
Source : IEEE telepresence | TNO
Humanoid
Source : https://www.i-botics.com/projects/xprize/
Virtual
Source : Haption
Building upon advanced force feedback technologies, high-quality sense-of-touch data is emerging as a critical resource for embodied AI and next-generation robotics. As research institutions, industrial leaders, and technology companies scale their investments in Physical AI, access to rich multimodal robotic datasets is becoming a key differentiator.
Robotics imitation learning, learning from demonstration, and robot skill acquisition increasingly rely on large-scale datasets combining vision, force, and motion information. High-fidelity force feedback enables the acquisition of high-quality robotic data, allowing robots to reproduce human expertise, learn dexterous manipulation, and generalize to real-world environments.
From simulation-to-real transfer and digital twins to remote operations and AI-driven automation, haptic data improves robot policy learning, behavioral cloning, and human-robot interaction. An access to large-scale multimodal datasets will become a strategic asset for organizations developing trustworthy AI, autonomous systems, and intelligent robotics.
Leveraging these rich robotic datasets, a new generation of foundation models and embodied AI systems is redefining how robots learn, adapt, and generalize skills across physical environments. Advances in imitation learning, inverse reinforcement learning, generative AI for robotics, and diffusion-based control are enabling robots to acquire increasingly complex behaviors from human demonstrations and large-scale interaction data.
Multimodal foundation models integrating vision, language, force, and control are accelerating the development of adaptable robotic systems capable of operating beyond narrowly defined tasks. By combining teleoperation, haptic feedback, and scalable data pipelines, organizations can improve dexterous manipulation, autonomous decision-making, and human-robot collaboration.
These advances are fueling the rise of autonomous systems that tightly couple perception, reasoning, and embodied action in the real world. From advanced manufacturing and aerospace to healthcare, logistics, nuclear applications, and service robotics, foundation models for robotics are shaping the future of AI-driven automation.
Discover how Haption’s products make enable to work efficiently on these challenges.
Real-time data streaming up to 1 kHz
Data collection from a high-performance haptic force-feedback teleoperation system
Designed to be compatible with all industrial and humanoid robots
Single Arm and Dual Arms setup.

CONFIGURATION #1. DIY
For robotics, haptics, and real-time control experts.
Maximum flexibility and customization (C++, ROS, ROS2, …)
Full control over algorithms and system performance
Ideal for pushing the performance to the limits
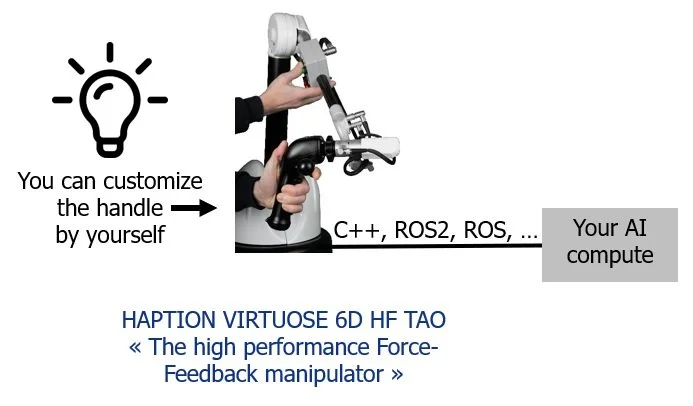
Illustration of the “DIY” configuration ROS2 for example
CONFIGURATION #2. Plug & Play Standard or Customized
For AI, algorithm and real-time data collection experts.
Immediate access to real-time data : position, velocity, and force
Rapid deployment bundle with no complex integration
Focus entirely on algorithm development and imitation learning
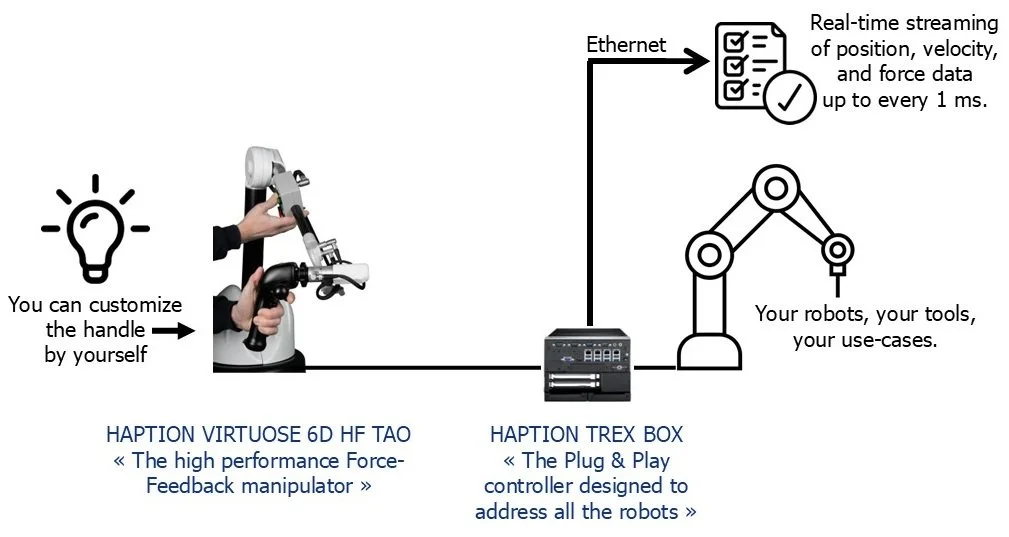
Illustration of the “Plug & Play” configuration to enable real time data collection.
Others architectures are available, please contact us.
Adopt our technologies, accelerate your projects!

Partner Spotlight: SenseGlove
Our technology, combined with our partner’s haptic glove, creates a fully integrated haptic system that delivers a complete and immersive user experience.
By unifying tactile feedback at the hand with kinesthetic force feedback from the fingers to the shoulder, the system provides a continuous and realistic sense of physical interaction across the entire upper limb.
This unique architecture significantly reduces user fatigue by avoiding the burden of wearing heavy active devices on the hand alone, while ensuring natural and ergonomic operation over extended sessions.
Designed for seamless integration, the platform offers high-quality interoperability and native ROS 2 drivers, enabling rapid deployment within advanced teleoperation, imitation learning, and industrial robotics environments.
About SenseGlove : https://www.senseglove.com/project-rembrandt/
How does it work?
The solution is built around the standard VIRTUOSE TAO HF device from Haption, which serves as the grounded kinesthetic force-feedback interface of the system. When combined with the SenseGlove haptic glove, it creates a seamless interoperable haptic force-feedback environment using native ROS 2 drivers. The final integration into your specific system environment, whether for robotics or virtual reality applications, can then be carried out by your team according to your project requirements and use case.
You first need to purchase a VIRTUOSE TAO HF device from Haption. This device is fully compatible with the SenseGlove haptic glove through an integration solution provided by SenseGlove.
For greater convenience, it is also possible to purchase the bundle VIRTUOSE TAO HF + its haptic Glove directly from SenseGlove.